Projects
Aerie/Clipper Scheduler
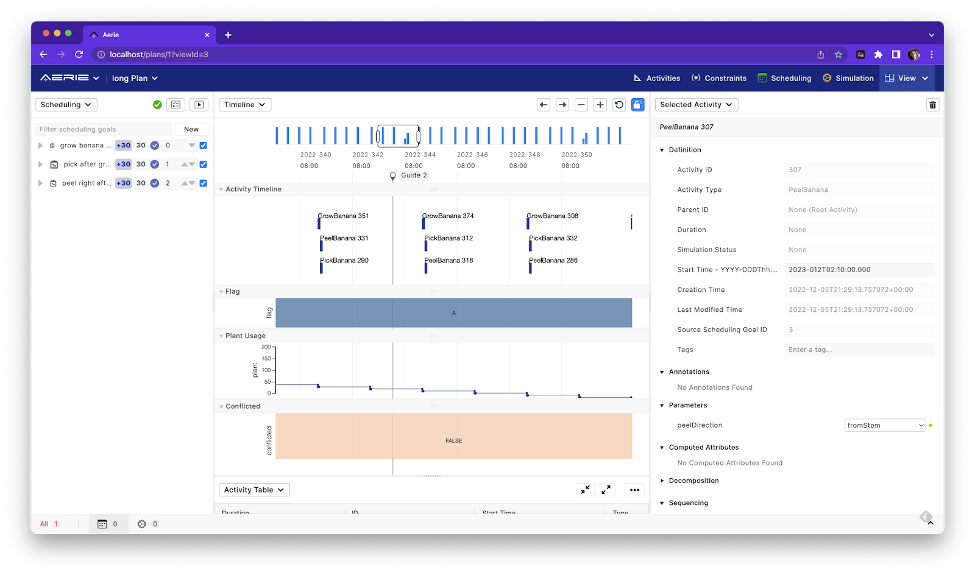
Example activity plan and resources shown in the Aerie user interface
Background
Aerie is a multi-mission activity planning, resource simulation, and command sequencing software framework currently in development by the Advanced Multi-Mission Operations System (AMMOS) team at JPL[1][2]. Aerie consolidates functionality previously found spread across prior AMMOS tools such as APGEN[3] and SEQGEN[4]. Aerie contains an automated scheduler that accepts mission constraints, goals, and preferences from the mission team and generates an activity plan to satisfy them. The scheduler is integrated with the other Aerie capabilities via a shared Java-based mission model, a common database backend, and a unified user interface. Aerie design and development leverages heritage from prior JPL mission planning tools such as APGEN[3], ASPEN (especially ASPEN-RSSC campaign planning for Rosetta [5] and CLASP usage on multiple missions [6]), as well as automated space mission planning developments outside of JPL [7].Problem
First, the software must capture detailed scheduling inputs from mission experts. This requires an expressive - yet accessible and maintainable - user interface language that encompasses the diversity of scheduling constraints and goals from the mission scientists and engineers. Furthermore, the users must be able to meaningfully balance among different competing goals to achieve their desired plan outcomes. The scheduler must also admit direct user intervention to place and manipulate activities in the plan.
Next, the scheduler must produce candidate activity plans that satisfy the goals in the context of anticipated initial conditions. Simulations of the black-box Java-based behavior models must be orchestrated judiciously to maintain performance. The scheduling requests may span horizons of several years and hundreds of thousands of activities, but must still allow for user interactivity and exploration.
Finally, the relative success of each goal and the overall plan must be concisely communicated to users in a way that fosters collaboration and adequately explains the results (especially for activities that could not fit in the plan). Missions such as Rosetta[5] and M2020[8] have shown valuable operational use of such explainability.
Impact
The Aerie scheduler is currently baselined for operational use for the Europa Clipper Mission.Status
Since starting in 2020, the team has engaged science and engineering planners from the Europa Clipper mission to provide realistic scheduling use cases. A prototype greedy priority-based scheduler was implemented and then integrated into core Aerie functionality in 2021. In 2022, the team connected user interfaces for accepting goal and constraint inputs (via a domain-specific language) and providing scheduler feedback (within the broader Aerie web interface). Scheduling rules have been prototyped with the Aerie scheduler domain-specific language for various domains such as telecommunications, pointing or instrument operations. Next steps are to continue expanding the vocabulary of goals and constraints available to users, optimize performance with the Aerie simulation engine, and scale up to full Europa Clipper tour sized plans.
Aerie is an open-source project hosted on GitHub under MIT license.
References
[1] https://github.com/NASA-AMMOS/aerie[2] https://ammos.nasa.gov/
[3] Maldague, P. F., Wissler, S. S., Lenda, M. D., & Finnerty, D. F. (2014). APGEN scheduling: 15 years of Experience in Planning Automation. In SpaceOps 2014 Conference (p. 1809).
[4] Streiffert, B. A., & O'Reilly, T. The Evolution of Seqgen - A Spacecraft Sequence Simulator. SpaceOps 2008.
[5] Chien, S. A.; Rabideau, G.; Tran, D. Q.; Troesch, M.; Nespoli, F.; Perez-Ayucar, M.; Costa-Sitja, M.; Vallat, C.; Geiger, B.; Vallejo, F.; Andres, R.; Altobelli, N.; and Kueppers, M. Activity-based Scheduling of Science Campaigns for the Rosetta Orbiter. Journal of Aerospace Information Systems, 18:10: 711-727. 2021.
[6] https://ai.jpl.nasa.gov/public/projects/clasp/
[7] Chien, S. A., Johnston, M., Frank, J., Giuliano, M., Kavelaars, A., Lenzen, C., & Policella, N. A Generalized Timeline Representation, Services, and Interface for Automating Space Mission Operations. SpaceOps 2012
[8] Agrawal, J.; Yelamanchili, A.; and Chien, S. Using Explainable Scheduling for the Mars 2020 Rover Mission. In Workshop on Explainable AI Planning (XAIP), International Conference on Automated Planning and Scheduling (ICAPS XAIP), October 2020.
[9] https://europa.nasa.gov/
Publications
Team
Steve SchafferAdrien Maillard