Projects
Agile Science

Background
Future missions to primitive bodies and deep space exploration may have limited time to explore unknown targets and to react/adapt to new science opportunities. To date, many deep space encounters are short flybys that use pre-scripted data collection sequences. This can negatively impact science yield, since it is not generally possible to precisely anticipate the pointing needed for narrow-field of view instruments. Operators cannot always speculatively predict the location of the features of greatest scientific interest prior to an encounter. Additionally, with insufficient time for ground in the loop control, it is impossible to reacquire or correct bad data caused by instrument errors, suboptimal exposure settings, or deviations from the predicted trajectory.
Problem
Exploring primitive bodies and unknown target in deep space presents a number of challenges. First, the science features and events being detected include varied and subtle signatures. For example, Plumes and outgassing events can be very faint and may appear in orientations that are challenging to detect. Also, illumination may be poor due to the Sun’s position (e.g., lighting behind the target) or due to the irregular shape of the target. If the target body has a very irregular shape, the exact illumination and observer viewing geometry may not be easily predictable.
The second challenge is that primitive bodies exploration often involves challenging timescales. For example, target bodies in the asteroid belt imply round trip light times to the Earth of approximately 1 hour. Given flyby durations of approximately 1 hour, ground analysis and response to downlinked science data by a ground team is not generally possible.
The third challenge is that navigation in the vicinity of primitive bodies is challenging due to many unknowns. That includes unknown or partially unknown gravity field of the target body, rotational axis and period, gas fields (e.g., for a comet) and out-gassing events for comets and asteroids, and the presence of satellites.
"Agile science" techniques would address these challenges by enabling spacecrafts to autonomously generate contingency plans that recognize and adapt to the intrinsic uncertainty in the operating environment and science objectives.
Impact
The Agile Science approach has a number of benefits: - It can enable dynamic science for primitive body missions. - The spacecraft can be more responsive to unexpected science opportunities. - Mitigate onboard target detection, planning and plan adaptation for fast response and higher science return. - It allows for modification of the existing observation plan to incorporate the new observation if warranted by science priorities.Description
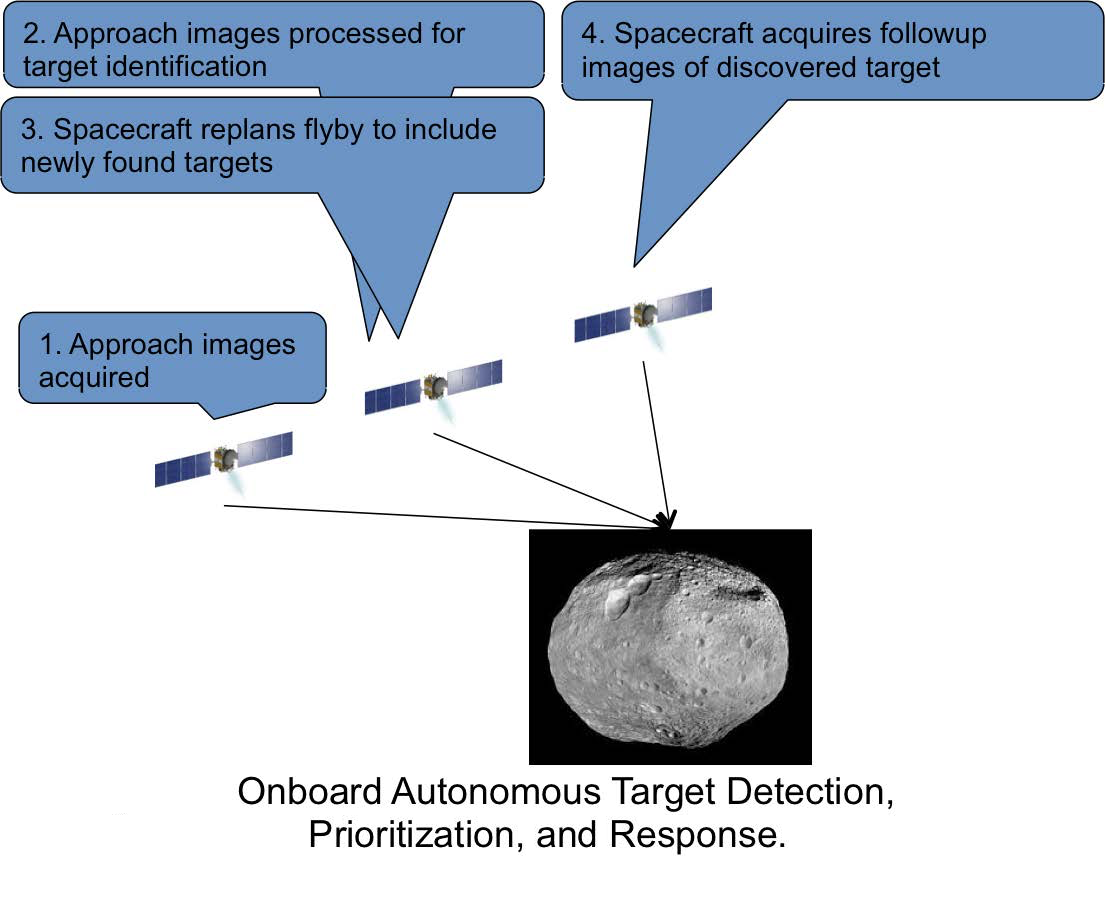
In the Agile Science paradigm, the spacecraft and flight software enable onboard analysis of acquired science data to inform subsequent spacecraft actions (see figure). Specifically, the spacecraft would:
-
- acquire science data
- analyze science data onboard, detecting targets and pre-specified features of interest
- generate new data acquisition/target requests based on priorities pre-specified by the science team
- plan and schedule the spacecraft actions to assimilate the new acquisition/target requests into its operational plan as appropriate based on prioritization
While the general concept of Agile Science applies to a wide range of instruments to support data acquisition, we have focused on imaging instruments. These instruments are central to most space missions, and commonly available as navigation cameras on nearly all modern spacecraft. They can detect a wide range of different targets which enables us to exercise a range of target detection and follow-up scenarios. For primitive bodies exploration there is a wide range of science phenomena that can be discovered upon arrival at the target that warrant follow-up observations. The detection of plumes in images of Enceladus acquired by the Cassini spacecraft, is an example of such acquisition and analysis process in the Agile Science approach. Detection is achieved by computing the convex hull enclosing the target’s horizon points and then classifying the pixels whose intensities differ substantially from the median intensity of the pixels within the convex hull. Here the system determines a polygonal mask defined by the aforementioned convex hull. Bright regions within an annulus surrounding the mask are candidate plumes.
Next, targets are selected based on priorities defined in advance by the science team. For example, a new target may be generated only if a plume appears in several consecutive image frames. The output of the target detection algorithm is a set of prioritized targets in the acquired imagery, each associated with specific line and sample locations.
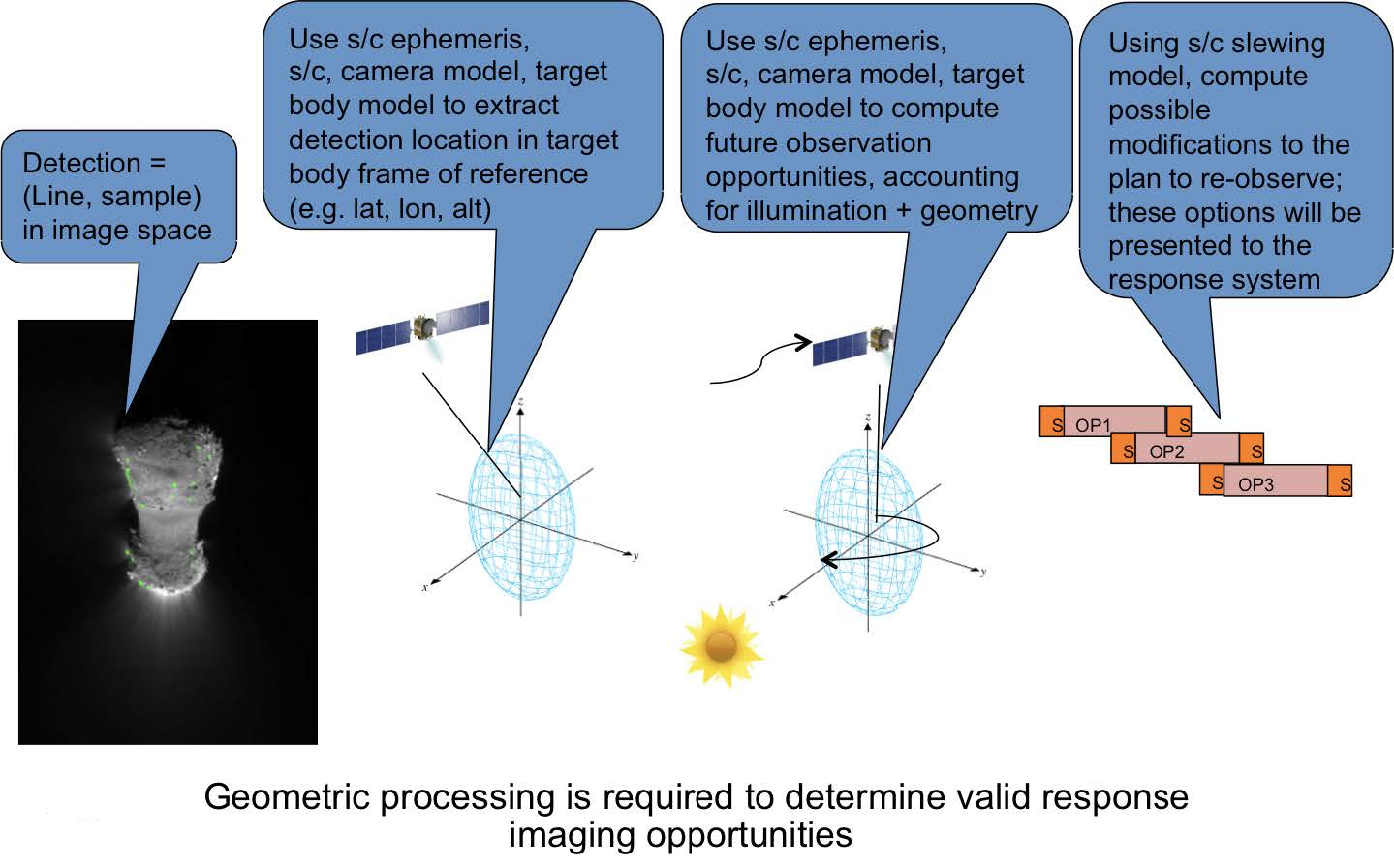
The coordinate of the each new target must be transformed into a target space coordinate of the spacecraft. Geometric reasoning is required to calculate the spacecraft's trajectory and legal viewing times based on the solar position and the dynamic of the vehicle. As a unique aspect of this work, this reasoning is made onboard the spacecraft as opposed to the traditional ground-based observation planning process. In this work, we have used a combination of geometric calculation libraries from SPICE as well as some custom code.
Once the timing of the re-observation opportunities has been computed, they can be passed the planning and scheduling system which then attempts to schedule follow-up observations based on science priorities. As above, the planning and scheduling is an onboard process which needs to be very fast (in seconds) Herein, we implemented adaptation of CASPER and Eagle Eye planners, in which detections from observations may spawn new goals posed to the planner. The goals are posed to the planner with priorities, and it uses its plan optimization capability to attempt to achieve the greatest number of highest priority goals. This approach has the benefit of being able to generate entirely new observation plans that achieve the highest priority science goals while respecting operations constraints. We also implemented an ad-hoc pointing planner that first screen of target feasibility by determining pointing plan, then it checks timeline, timing, constraints to schedule the responses in a priority-first fashion using a greedy, heuristic, non-incremental scheduler.
Applications
Agile science techniques are applicable across a wide range of primitive body missions/concepts either currently flying or under study. The techniques have been studied in different flyby scenarios, plume detection and landing site characterization.
Publications
Team
Jet Propulsion Laboratory, California Institute of Technology:Steve Chien
Gregg Rabideau
Martina Troesch
Dero Gharibian
Russell Knight
Julie Castillo-Rogez
David Ray Thompson
Brian Bue