Projects
Autonomous Profiling Floats

Argo float. Source: NASA, NASA’s Earth Observatory.
Background
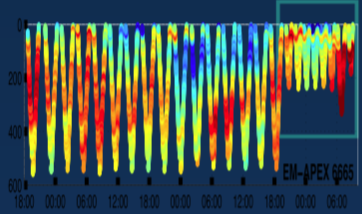
The EM-APEX (ElectroMagnetic Autonomous Profiling EXplorer) is a modified version of the APEX profiling float made by Teledyne Webb Research for use in the global Argo observational array. The EM-APEX adds the capability of measurement of ocean currents during the float profile.
Profiling floats use a piston and a flexible oil-filled bladder to change their buoyancy and are capable of traveling from the ocean surface to a depth of 2000 m several hundred times (at a vertical speed of up to 0.12 m/s) on a single set of batteries. While profiling, they collect measurements of temperature, salinity and pressure. While at the surface, they receive GPS positions, send position and profile data to a shore server via Iridium satellite phone, and receive mission commands from the server.
Problem
The state of the ocean affects the environment and climate, thus affecting food production, defense, and leisure. As such, ocean dynamics is an important area of study that currently uses a variety of different techniques to measure ocean conditions.
Scientists studying the characteristics of the ocean would ideally like to be able to collect data at all depths and all times at a particular location. Obviously, a single float cannot be at all depths at all times and therefore must profile to collect data across the depths.
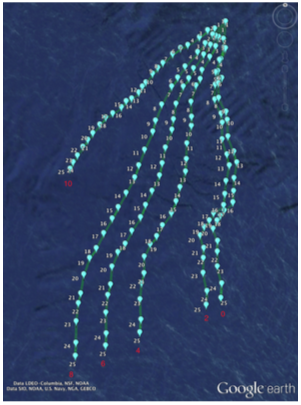
Vertically profiling floats can only control their depth, they do not have propulsion in the lateral direction. Therefore the floats often drift in ocean currents away from the desired measurement area.
This work uses a Regional Ocean Modeling system (ROMS) predictive ocean model in order to design diving and surfacing (profiling) sequences to attempt to keep the float as close to the desired location of data collection as possible.
Impact
An early version of this software was deployed to control EM-APEX floats during an April 2015 deployment in support of an AirSWOT field experiment in the coast off of Monterey Bay, California. This same technology is being deployed to other types of marine assets (e.g. gliders and autonomous underwater vehicles (AUVs)).
Description
We examined the impact of batch versus continuous planning. In batch planning the float depth plan is derived for an extended period of time and then executed open loop. In continuous planning the depth plan is updated with the actual position and the remainder of the plan re-planned based on the new information. We have shown that (a) active control can significantly improve station keeping with even an imperfect predictive model and (b) continuous planning can mitigate the impact of model inaccuracy.
Batch Planning
The value of the currents used for determining the motion of the float is based on the position of the float as well as the time. Every approximately 42 seconds (the amount of time that it takes the float to vertically move half of the smallest depth step), the position is updated and the current information is interpolated among the eight closest grid points. This current is used to determine the motion of the float until the next interpolation step or the allotted time step for the node has been reached.
Continuous Planning
During every data upload when the float resurfaces, there is an opportunity to re-plan the path of the float based on the best information of its location. Each time the float performs an upload, the location at the true position of the path so far in the execution can be used in an algorithm to plan the rest of the path using the planning model.
The next part of the control sequence is executed according to the re-planned path. The process of re-planning is repeated each time that the float re-surfaces until the duration of the mission has been completed. In simulation, the control sequence is always executed in the nature model (representing the truth) and planned in the planning model.
Publications
Team
Jet Propulsion Laboratory, California Institute of TechnologySteve Chien
Martina Troesch
Remote Sensing Solutions
Yi Chao
John Farrara
University of Washington, Applied Physics Laboratory
James Girton
John Dunlap