Projects
Planetary Cave Rovers
Skylight of a lava tube on Mars. Source: NASA/JPL/University of Arizona.
Background
Exploration of planetary caves offers exciting opportunities for 1) human settlements, 2) understanding the planet's evolution, and 3) the search of extraterrestrial life. They present the most mission effective habitat alternative for future human exploration, offering a stable environment shielded from harmful radiation and dust storms, as well as access to minerals, gases and ice.
Equally important, caves may preserve valuable information about a planet's evolution: for example, they offer stable physio-chemical environments, trapped volatiles, secondary mineral precipitation and microbial growth, which are expected to preserve bio-signatures and provide a record of past climate. Moreover, caves can potentially host water deposits which, through interaction with volcanic heat and minerals, could have created a favorable environment to microbial life preservation.
Earth's moon and Mars have abundant cave targets for future robotic exploration missions, however, several technological challenges need to be addressed to enable such mission concepts.
Problem
Communicating with a rover into any of these caves and transmitting science data out is in itself a hard problem. Without a link to the surface, a rover would not be able to go far into the cave without losing contact with the base station. Moreover, because sunlight is not available in the cave, a mission would be likely to last only a few days if the rovers were to rely exclusively on battery power, versus the option of radioisotope power systems. Cave rovers would have to be far more autonomous than the existing surface rovers, for their environment is unknown and their communication with Earth is extremely limited, if at all.
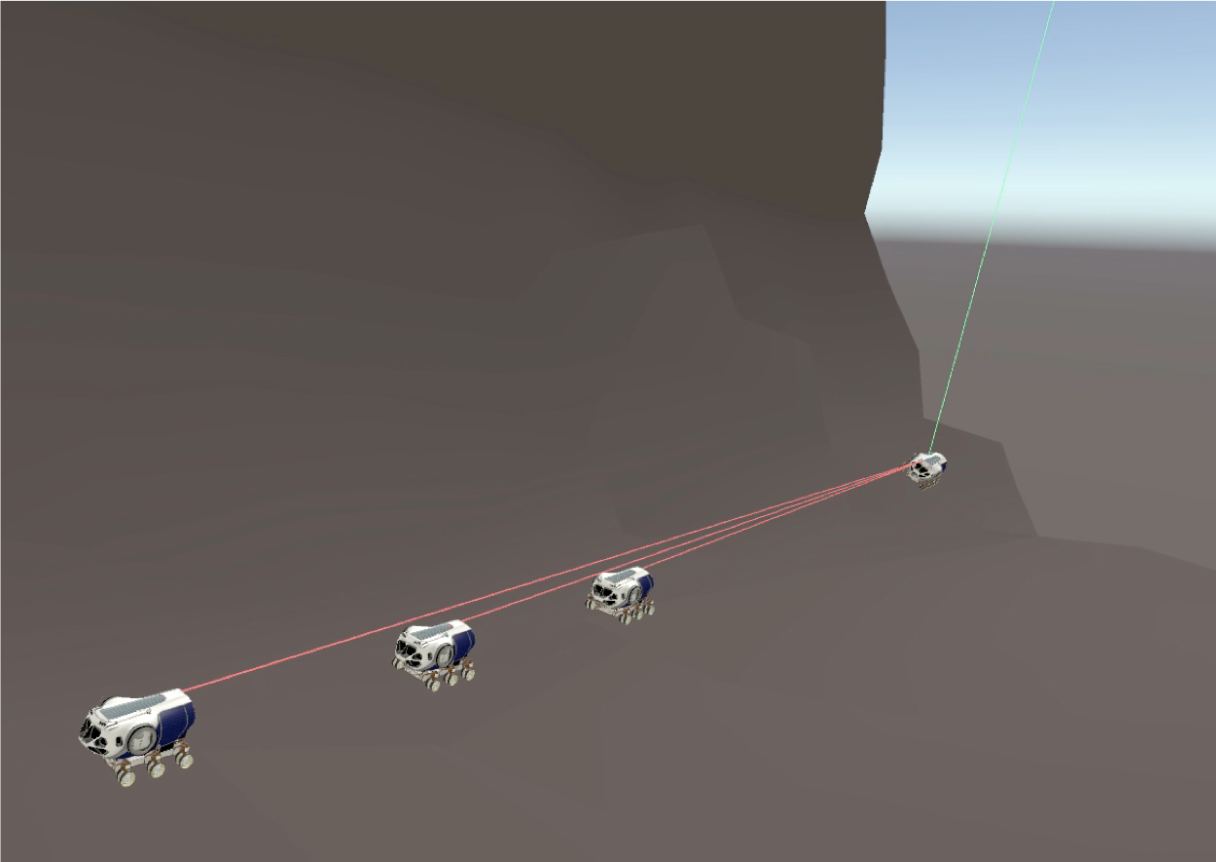 Visualization of rovers exploring a cave. Cave model courtesy of Tommaso Santagata/Inside the Glacier Project; Rover 3D model, a notional Space Exploration Vehicle (SEV), from NASA LaRC Advanced Concepts Lab, AMA Studios.
Visualization of rovers exploring a cave. Cave model courtesy of Tommaso Santagata/Inside the Glacier Project; Rover 3D model, a notional Space Exploration Vehicle (SEV), from NASA LaRC Advanced Concepts Lab, AMA Studios.
Autonomy in multi-rover coordination is a key mission enabler to help rovers to map and characterize as much of the cave as efficiently as possible with their very limited lifetime. The AI community has recently started to look into techniques for rover coordination to map and explore these cave environments.
A traditional approach would be to use a centralized system to coordinate task allocation and communication among the rovers. However, this approach becomes unfeasible in a realistic cave environment due to intermittent, unreliable communication, as well as the high cost of communication power associated with the centralized scheme.
Communication in cave environments can change rapidly as assets move around, which can complicate coordination among multiple assets. Limited lifetime must also be accounted for when exploring these subsurface structures, because it is likely that recharging the batteries of the robots will not be possible. The combination of uncertain communication and limited mission duration suggests that accounting for energy when transmitting data out of cave-like structures would be beneficial to mission success. We study energy-aware, smart, distributed routing capabilities in a multi-rover exploration scenario, in which science data is acquired by multiple science vehicles and routed to a target base station in a changing network environment. Under restrictive communication and energy constraints, science data products (e.g., 3D maps or fluid- and thermodynamics measurements) have to find their destination efficiently through the network to be processed. Efficiency becomes even more important when such data transportation is in the critical path to make crucial decisions in a timely manner.
Impact
A multi-rover approach for Cave exploration has a number of benefits: - It can enable science deeper into the cave where direct communication with surface assets is limited or non-existent. - Mitigates mission reconfiguration and adaption in rover failure cases. - It allows exploration and science return without (or with minimum) waiting for commands from ground/Earth.Description
In this project, we study multi-rover coordination techniques to allow vehicles to autonomously explore the unknown environments of caves on Mars and the Moon. Since the ultimate goal is to return science data, data routing becomes a key design point. To analyze our different techniques, we developed a simulation framework to easily compare different mission configurations.
Simulation Framework
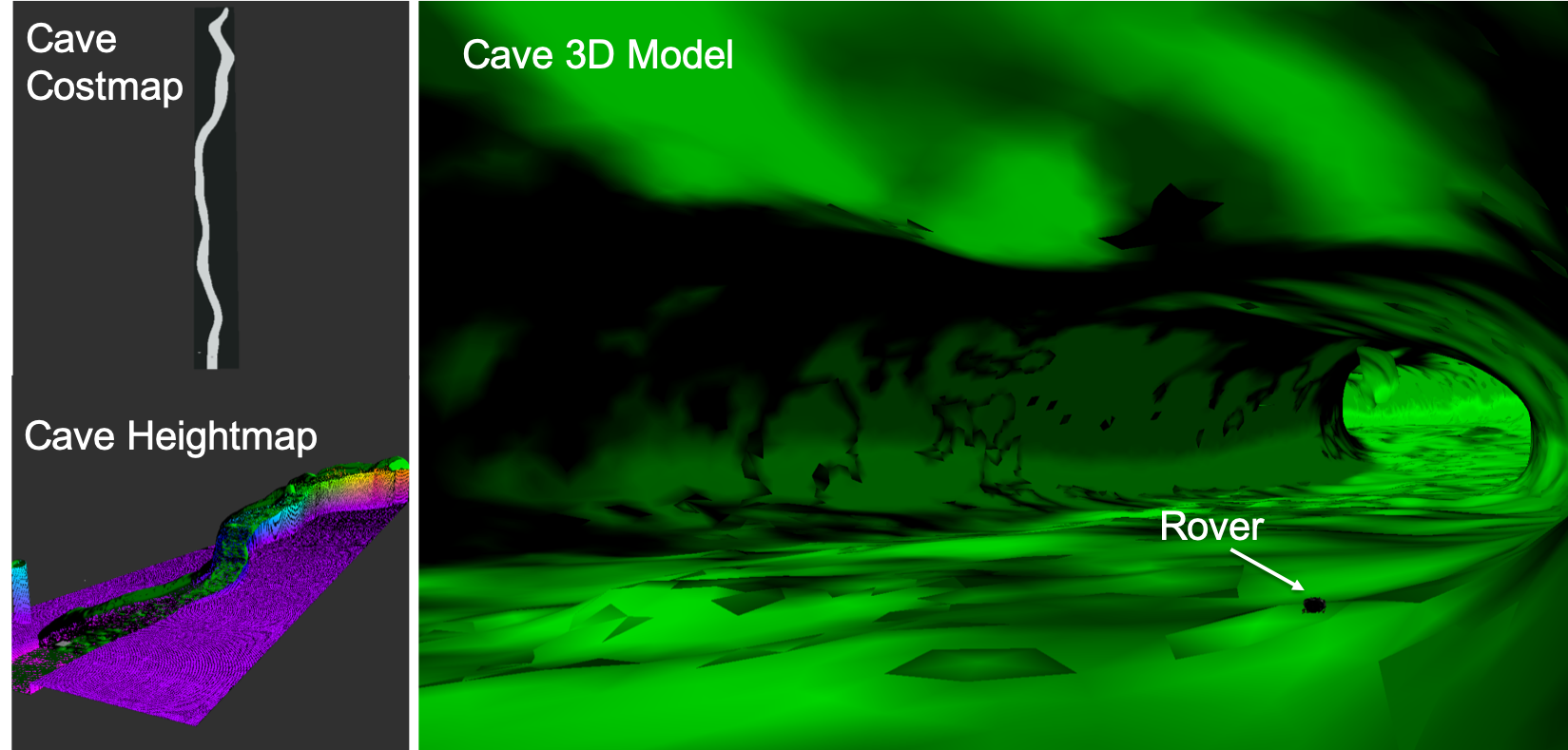 Simulation visualization in RVIZ. Cave model courtesy of Tommaso Santagata/Inside the Glacier Project; Rover 3D model, a notional Space Exploration Vehicle (SEV), from NASA LaRC Advanced Concepts Lab, AMA Studios.
Simulation visualization in RVIZ. Cave model courtesy of Tommaso Santagata/Inside the Glacier Project; Rover 3D model, a notional Space Exploration Vehicle (SEV), from NASA LaRC Advanced Concepts Lab, AMA Studios.
We developed a simulation framework to easily run different configurations for mission concepts, which provides diagnostic output to evaluate performance. It is implemented in the Robot Operating System (ROS) and allows configuration of asset parameters, environmental parameters, and mission concept parameters, including the number of assets, asset specifications (such as the communication model, navigation model, exploration strategy, and science instruments), and the cave model. Diagnostic output includes an interactive visual playback of the scenario, activity timeline and distribution, paths travelled by the assets, and energy usage distribution.
Coordination Strategies
We propose two multi-rover coordination strategies for cave exploration that aim to send rovers as deep into the cave as possible while also maximizing data sent out to a surface base station.
The Dynamic Zonal Relay Algorithm with Sneakernet Relay is a two-step algorithm. The first phase of the algorithm (Dynamic Zonal Relay) distributes rovers to designated zones along the length of the cave such that neighboring rovers maintain communication distance. Each rover only takes science data in its designated zone and transmits it in the direction of the base station. If a rover is no longer operable, the other rovers will dynamically re-distribute the zones to both maintain communication distance and collect science data. The next step of the algorithm (Sneakernet Relay) allows the rovers to acquire science data further in the cave by relaxing the restriction on maintaining communication distance. This means rovers may need to drive after acquiring data to transfer it out of the cave.
The second coordination strategy is the Scout Observation Algorithm. In this strategy, a set of scout rovers with limited science capability explore the cave using a method such as the Dynamic Zonal Relay Algorithm to find science targets, which are then visited by a more powerful science rover. The data collected by the science rover is then relayed out to the base station using the scout rovers.
Energy Aware Data Routing
We investigate new algorithms/protocols that enhance the Delay/Disruption Tolerant Networking (DTN) framework with the capability of considering energy as a critical routing factor. As an example, we propose Energy-Aware Contact Graph Routing (ECGR) that extends traditional CGR by finding paths of minimal energy over a time-varying topology of pre-scheduled contacts.
Applications
Multi-rover coordination techniques are applicable across a wide range of caves and underground structures, as well as unknown target environments in which communication is limited or not available.
Publications
Team
Jet Propulsion Laboratory, California Institute of TechnologySteve Chien
Martina Troesch
Tiago Vaquero
Amos Byon
Sponsors
Research and Technology Development ProgramJet Propulsion Laboratory, California Institute of Technology