Projects
Marine Autonomy

Background

Probing the ocean interior efficiently requires marine vehicles such as autonomous underwater vehicles (AUVs), gliders, profiling buoys, surface vehicles, and ships sampling in situ. Unfortunately, building, deploying and operating these in situ marine robotic explorers is expensive. As a result, any study involves a limited number of marine vehicles, especially when compared to the vast expanse of the ocean. Determining where to deploy and operate marine assets is a challenging problem given the 4D spatiotemporal variations in oceanographic phenomena. The use of autonomous marine vehicles will increase as the size of ocean observing systems expand in order to study the impact of the oceans on Earth's climate and ecosystems. The day-to-day operations of these systems will become increasingly difficult if human intervention is required. In order to enable large observing system to operate, techniques for autonomous control of assets based on science goals and data sources such as in situ measurements, remote-sensing, and model-derived data must be developed. Our project targets automatic generation of mission plans to follow science derived templates.
Read more about the project at Keck's project website.
Problem
The goal of our project is to provide underwater vehicles with autonomy to detect and track oceanographic features to enable more effective use of expensive in-situ assets and ease the burden of human operation, allowing for larger scale sensor networks.
Status
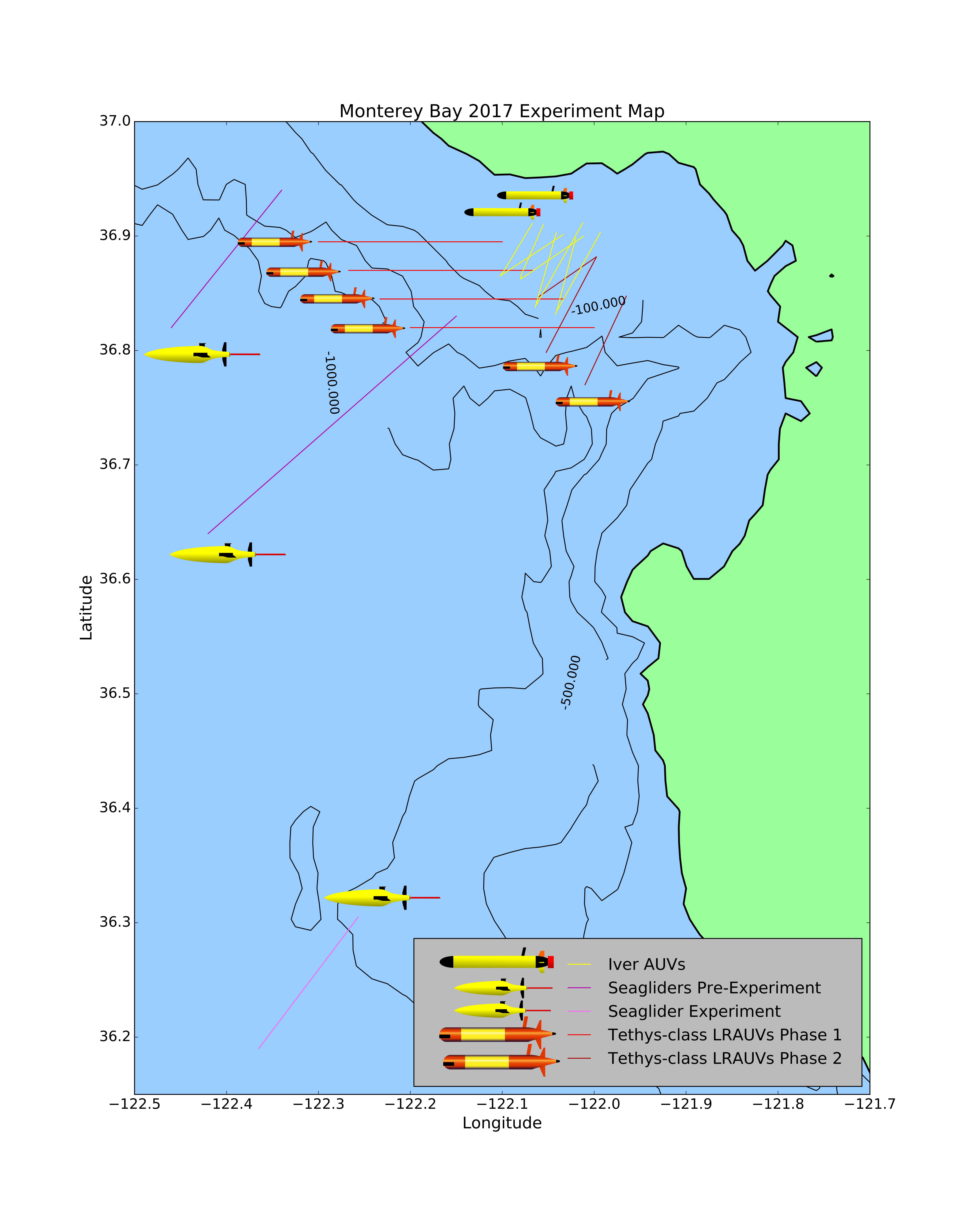
This project conducted a series of vehicle deployments in Monterey Bay in 2016 and 2017.
Description
This project focuses on automatic generation of coordinated mission plans for teams of assets to follow science derived observation policies. A typical strategy would be to deploy marine assets to measure transects across the feature of interest, such as fronts, eddies, upwelling events, and harmful algal blooms, at a scale that covers the feature, as well as a baseline signal around the feature.
To this end, we developed an approach using a single autonomous underwater vehicle and a numerical ocean forcast to repeatedly sample submesoscale features. The Regional Ocean Modeling System (ROMS) is used to predict the location of features and the vehicle is commanded to sample said features. This was successfully field tested in fall 2016 using an underwater glider near Monterey Bay.
As an extension to this, a method was developed using multiple vehicles to create a linear estimation of an ocean front's geometry - using near real time data from the vehicles - and to continuously direct this team of marine robotic vehicles to perform orthogonal transects across said front. This method was tested on three types of underwater vehicles: short-range Iver Autonomous Underwater Vehicles, Tethys Class Long-Range Autonomous Underwater Vehicles, and Seaglider underwater gliders in Monterey Bay in late spring 2017. This deployment was the result of a team effort between the KISS project members and the MBARI Spring 2017 CANON participants. These methods represent significant steps towards a fully-autonomous adaptive sampling framework.
Publications
Team
Jet Propulsion Laboratory, California Institute of TechnologySteve Chien
Andrew Branch
Evan Clark
Martina Troesch
Selina Chu
California Institute of Technology
Andy Thompson
Mar M. Flexas
Woods Hole Oceanographic Institute
James Kinsey
Brian Claus
James Kepper
Remote Sensing Solutions
Yi Chao
John Farrara
David Fratantoni
Monterey Bay Aquarium Research Institute
Brett Hobson
Yanwu Zhang
Brian Kieft
Francisco P. Chavez
Sponsors
Research and Technology Development Fund, Jet Propulsion Laboratory, California Institute of TechnologyKeck Institute for Space Studies, California Institute of Technology