Projects
MASCOT
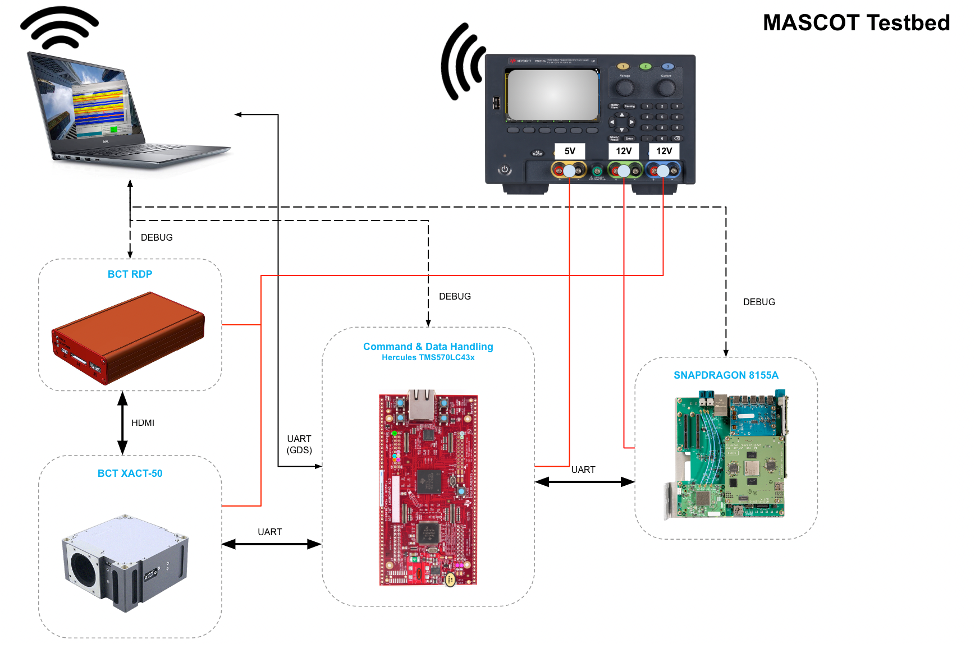
MASCOT hardware diagram. It contains a C&DH and a Snapdragon that connect to a PSU and a network connected computer. The BCT XACT and RDP are also connected to the computer and PSU. Source: JPL
Background
Autonomy capabilities for near-term missions should be modeled in simulations that are as realistic as possible. The use of flight project testbeds is commonly used for this purpose. However, these project testbeds are oversubscribed and take significant effort to set up. To overcome this, an adaptable testbed for testing autonomy software will be created.
The Multi-mission Autonomous Spacecraft Operations Testbed (MASCOT) is designed to be mission and platform agnostic. It runs on the open-source F Prime flight software framework. The hardware is an adaptable co-processor configuration, designed to be able to easily swap in different processors.
Technology
A TI Hercules processor is the Command & Data Handling computer along with a Snapdragon 8155A as a co-processor. This is the same configuration as the Ingenuity helicopter. In the future, MASCOT will explore integrating a SiFive HiFive Unmatched SoC. This RISC-V board will help in the transition to the High Performance Spacecraft Computing (HPSC) prototype when that is available. Linux is planned as the operating system.
MASCOT will have a commercial attitude control system designed for Cubesats. The ACS is a Blue Canyon Technologies XACT with the a Real-time Dynamics Processor. This will allow us to simulate many functions of a real satellite.
Autonomy algorithms will be tested on the Snapdragon co-processor. MASCOT will test the AutoNav 2.0 flight software once we integrate F Prime. MEXEC will also be used to test a variety of onboard autonomy capabilities. This will allow MASCOT to integrate ground software developed by the Ops for Autonomy project.
In the future, a variety of autonomy software will be tested on MASCOT. One line of interest is developing autonomous data management capabilities. A second is integrating AI accelerators to test the use of demanding onboard machine learning algorithms at a system level.
Impact
MASCOT is a scalable, adaptable, and forward-looking testbed that will allow for V&V of autonomy software at a systems level. It could be used to advance the readiness levels of AI technologies.Status
As of early 2023, MASCOT is in early stages of development. We are setting up the primary hardware -- the flight computers, server, and power supply. The XACT will be integrated later this year. MEXEC and AutoNav FSW libraries will be used once they are integrated with F Prime later this year.Publications
Team
Lorraine FesqTiago Vaquero
Sponsors
JPL Engineering and Science DevisionJPL Center Inovation Fund
Technical Equipment and Facilities Infrastructure Management (TEFIM) Program