Projects
Planning and Prosecution for the Ocean Observatories Initiative (OOI)
Background
The Ocean Observatories Initiative (OOI) seeks to develop Observatories for long term study of the Earth's Oceans. An important part of this is the ability for Observatories and their associated sensors and vehicles to operate autonomously to respond to and observe dynamic ocean events such as eddies, harmful algal blooms, and other physical and biological features. The Planning and Prosecution Element of OOI is intended to develop, demonstrate, the ability for teams of ocean vehicles to autonomously operate to achieve observation goals.
This work addresses mission planning for fleets of autonomous underwater vehicles such as gliders in support of a persistent Ocean Observatory. Our work uses an ocean model of the uncertain, time-varying current field. Glider submersibles are highly sensitive to prevailing currents so mission planners must account for ocean tides and eddies. Previous work in variable current path planning assumes that current predictions are perfect, but in practice these forecasts may be inaccurate. Here we evaluate plan robustness using empirical tests on historical ocean forecasts for which followup data is available.
Problem
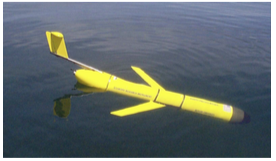
Gliders offer a unique capability to explore the ocean due to their long range (up to over 1 year at 0.5 knots) and ability to operate with minimal supervision. However, glider mission planning is a challenging problem domain because the phenomena under observation and vehicle motion constraints can change dramatically on mission time scales. Additionally, due to relatively strong currents (up to 5 knots) when compared to vehicle velocity (0.5 knots), glider submersibles are highly sensitive to prevailing currents, so mission planners must account for ocean tides and eddies.
Impact
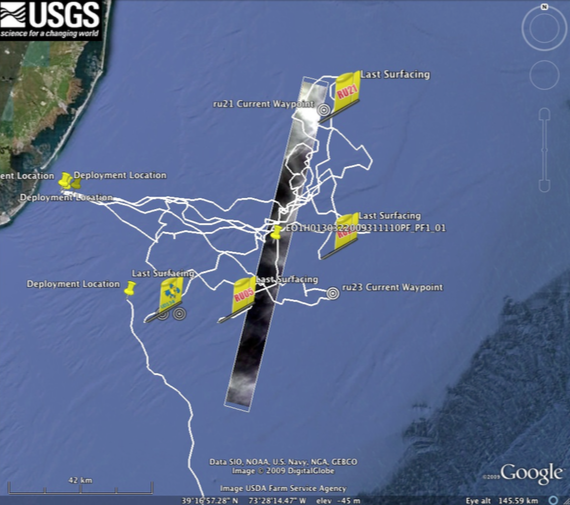
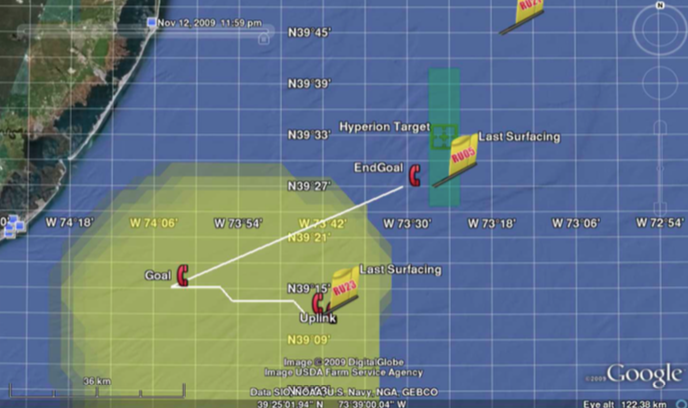
The path planner was used in a 2009 mission planning system for four ocean gliders in the Mid-Atlantic Bight.
Status
Automatic glider path generation was used in support of a deployment of 4 gliders in the Mid Atlantic Bight in 2009. The end target is to develop capabilities to support the Ocean Observatories Initiative (OOI), a science-driven oceanic sensor network
Description
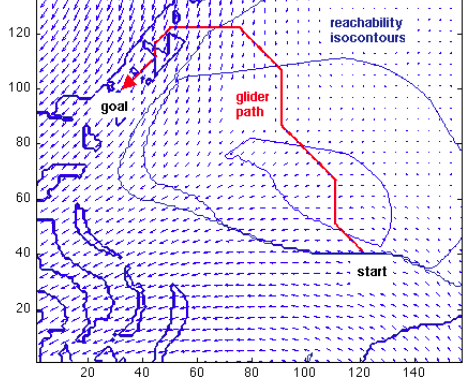
We have developed a wavefront algorithm for path planning in time varying currents based on an earliest valid arrival criterion. Our approach minimizes the time of travel to the goal position under the constraint that the glider is then capable of holding position against currents until the desired time is reached. This permits goals specified as arbitrary spatiotemporal volumes
We use Regional Ocean Modeling System (ROMS) forecast models provide to provide a depth averaged current estimate Cxyτ for an ocean volume with discrete grid squares indexed by time intervals τ, latitude x, longitude y. A glider path is comprised of segments traveling between adjacent nodes in the 3D grid. Segment endpoints take specific continuous time values in their nodes’ intervals. We treat the temporal and spatial dimensions differently: segment endpoints must lie exactly on the physical locations represented by grid points, but they can lie anywhere within the continuous time interval covered by the grid square. The figure illustrates a simple four-segment path through the spatiotemporal grid. The glider begins in the lower center and travels a path to the goal location represented by the yellow grid square at the top. The final segment of this trip consists of a station keeping action; the glider waits at the same location until it enters the time interval of the destination node.