Projects
Rosetta
Background
Rosetta was an extremely ambitious mission by the European Space Agency [ESA, Factsheet] to conduct the most detailed exploration of a comet ever performed.
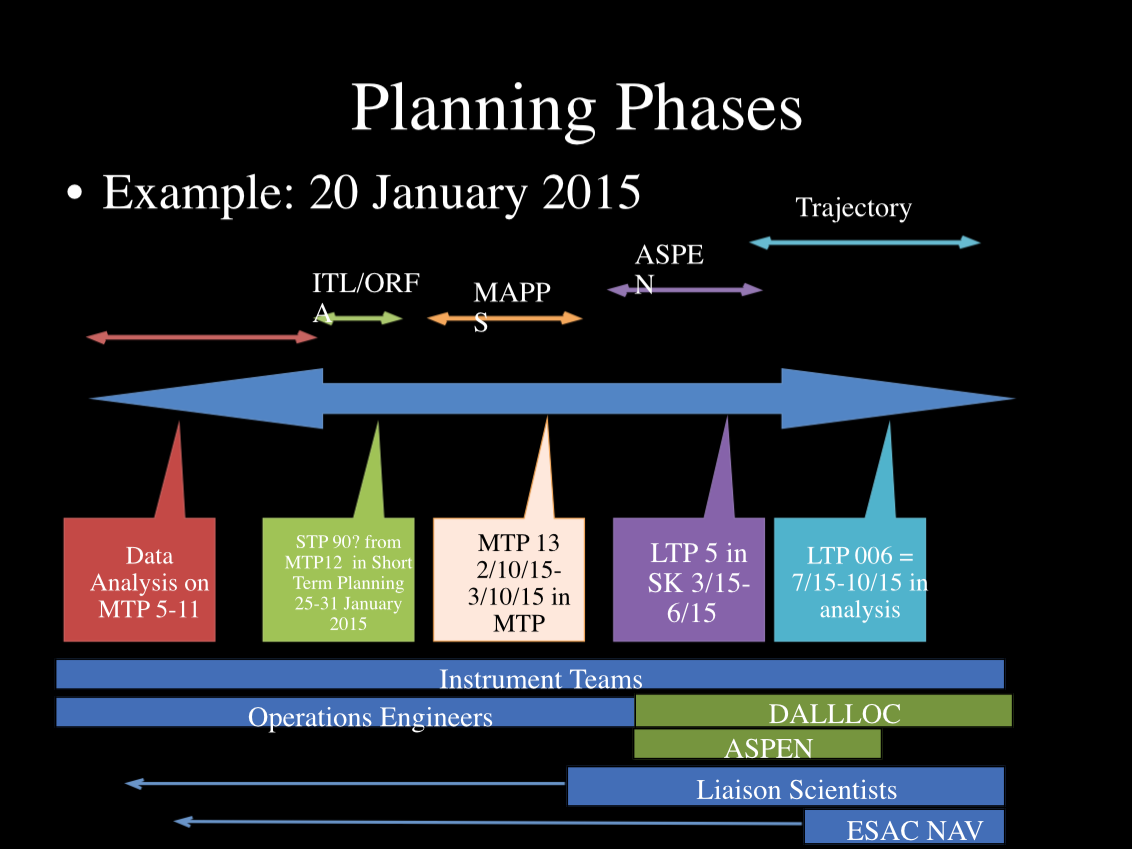
Rosetta Science Planning is a complex, hierarchical, incremental process. Once a long term plan is formed, as it approaches operations, it is systematically refined and detailed. Depending on the mission phase, portions of the mission are broken down into 16-week duration Long Term Plans (LTP), 4-week long Medium Term Plans (MTP), or 1-week long Short term plans (STP).
Problem
Science planning for the Rosetta mission is extremely complex with each of the eleven science instruments conducting multiple science campaigns and presenting numerous operational constraints on the spacecraft to achieve their science measurement including geometry, illumination, position, spacecraft pointing, instrument mode, timing, and observation cadence. Because of the challenges in effectively planning science instrument operations, ESA has a highly skilled team of liaison scientists and instrument operations engineers who work with the instrument teams using the SGS to develop science plans for the Rosetta mission.
Status
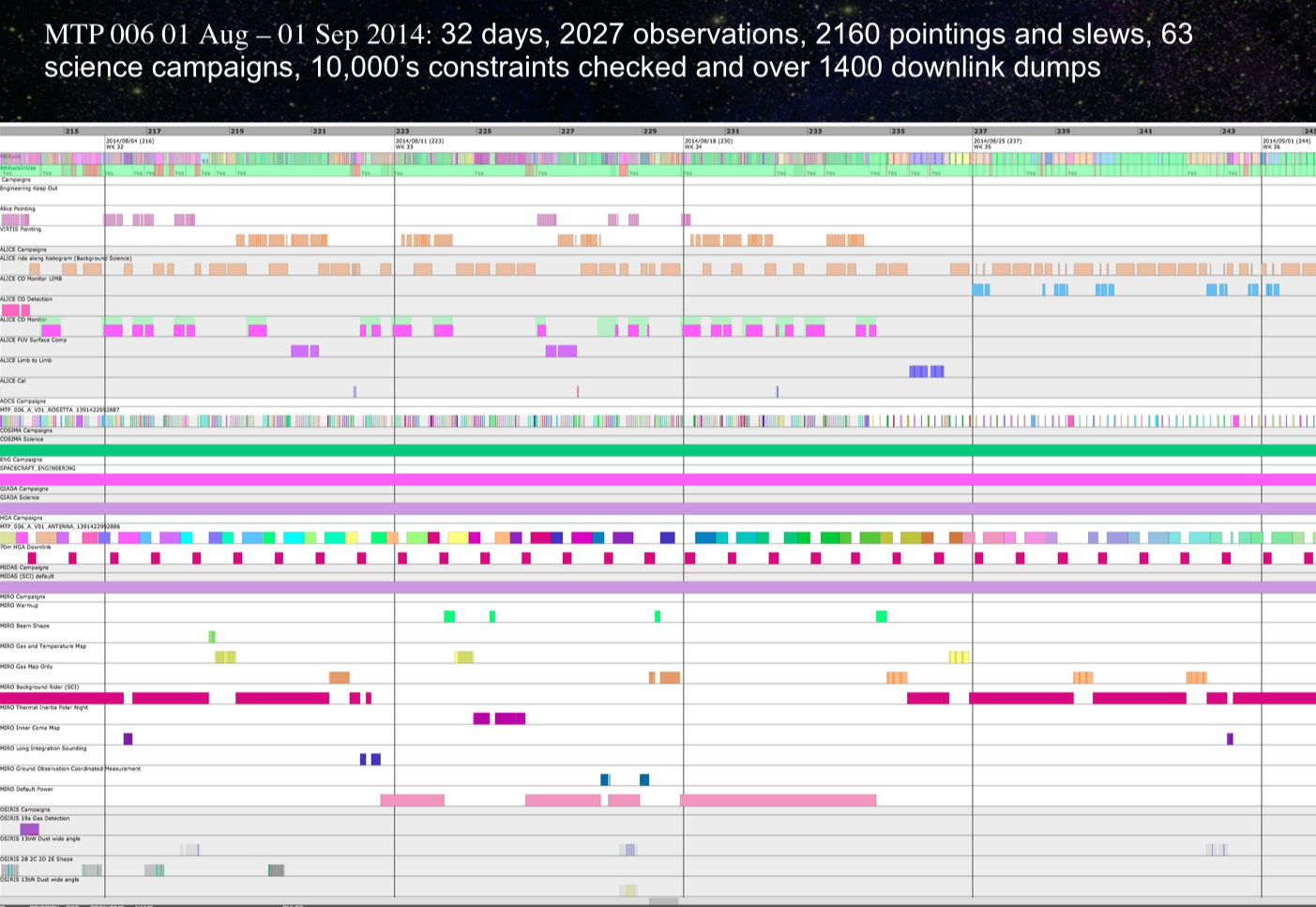
ASPEN-RSSC is an adaptation of the ASPEN scheduling system for Rosetta Science Planning. The ASPEN-RSSC activity scheduler was used operationally to develop prototype 6 month Escort Phase Science Plans for delivery in July 2013 and again in December 2013. After the Rosetta Orbiter exited hibernation in January 2014, ASPEN-RSSC was used from Spring 2014 to Spring 2015 to develop pre-landing and escort phase plans for the skeleton planning phase to transition from long term plans into medium term planning phases of Rosetta Orbiter operations. In these phases approximately 28 operational Rosetta MTP's, each approximately one month in length were delivered. The most complex of these, MTP 6, included 58 science campaigns, 2014 observations, and 2130 pointing and slews. After the Spring 2015 Orbiter safing occurrence, the Rosetta operations process was changed to perform science planning without a definite reference trajectory and ASPEN-RSSC was no longer used. The above figure illustrates the main aforementioned planning phases.
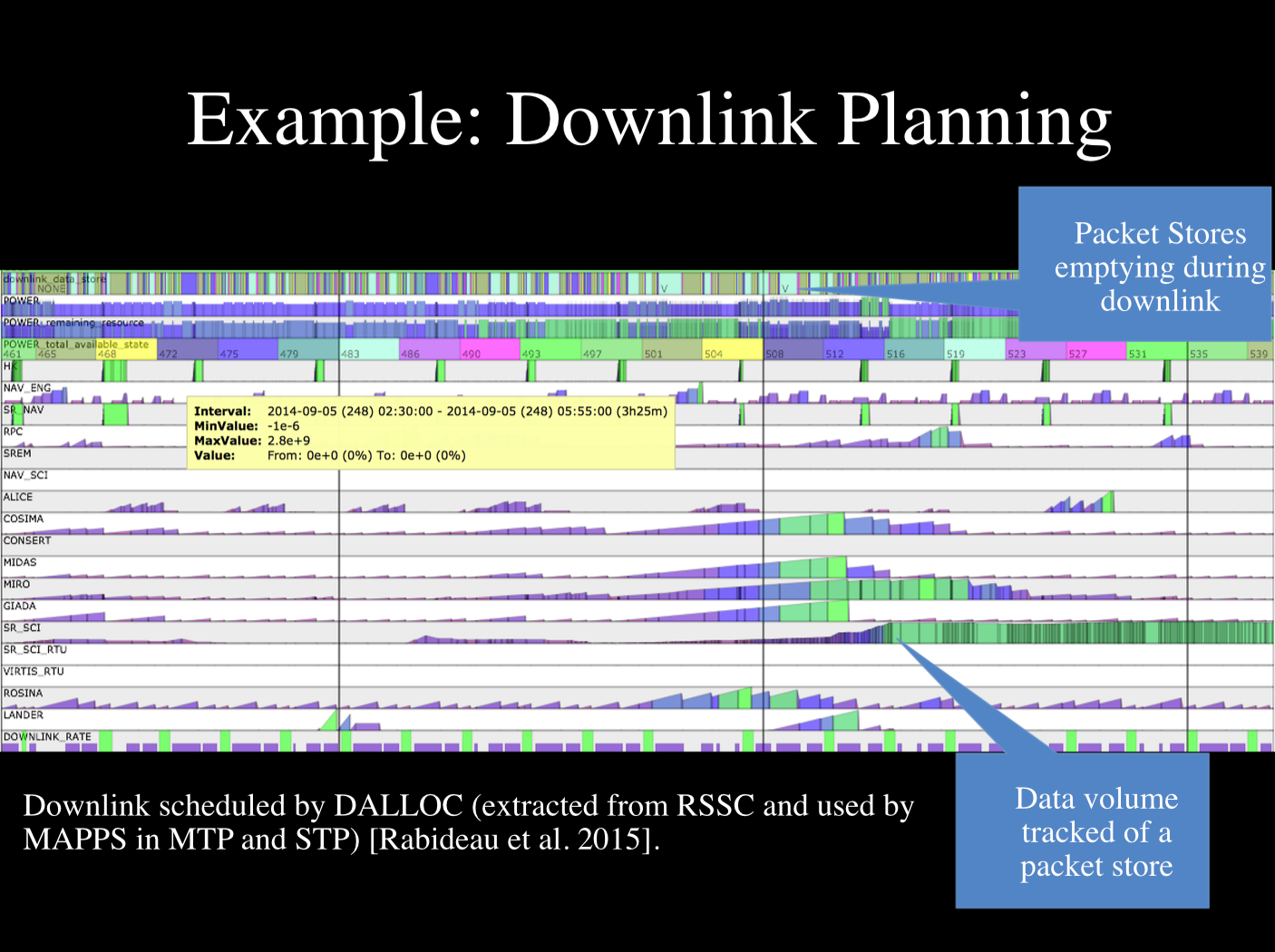
Prior to landing delivery, the data management and downlink planning portion of ASPEN-RSSC was separated into the DALLOC data management planning tool. DALLOC was used during the ASPEN-RSSC planning usage, and also in the post safing Rosetta operations until the end of mission in September 2016.
The two figures that follow illustrate the plans generated by ASPEN-RSSC and DALLOC.
Description
Rosetta science planning proceeds by successive refinement of an abstract science plan, refining the plan and detailing the spacecraft observations and spacecraft pointing successively through a number of planning phases: long term planning, medium term planning, and short term planning.
ASPEN-RSSC used a constructive, priority-first scheduling algorithm to generate schedules. In this algorithm, campaigns are scheduled in priority first order. Within each campaign, each scheduling rule is also executed in priority order. When scheduling each observation ASPEN-RSSC computes all valid constraint intervals as indicated below:
- campaign interval- separation from other observations as specified by the scheduling rule
- windows of opportunity
- instrument, subsystem, and mechanism mode constraints
- prime and rider attitude availability
- availability of resource packet stores (e.g. data storage)
- data transfer rate constraints
- power
When computing the above intervals, ASPEN-RSSC computes valid intervals even where prior constraints have ruled out observation times. While this decreases the efficiency of the scheduler, it increases the utility of this constraint information that is also used to manually analyze the results of the automated scheduler in working towards a feasible plan.