Projects
AI Smarts for an Ice Hunting Radar: SMart ICE cloud Sensing (SMICES)
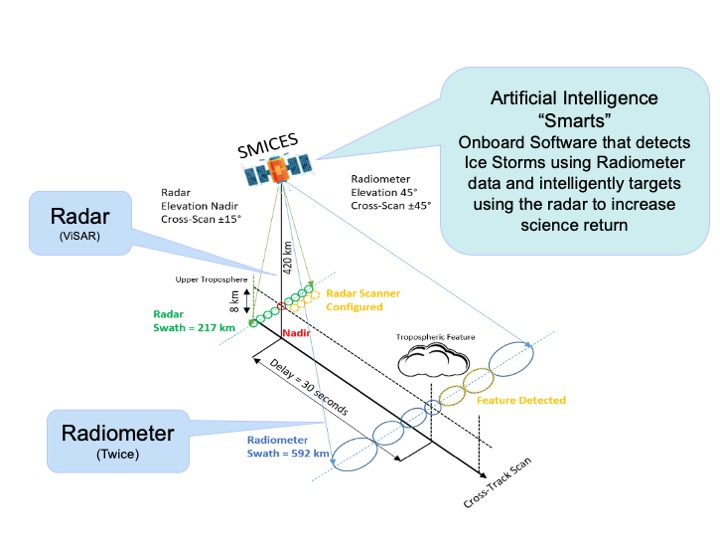
SMICES Mission concept: forward looking radiometer used to target radar
Background
Smart Ice Cloud Sensing (SMICES) is a small-sat concept in which a primary radar intelligently targets ice storms based on information collected by a lookahead radiometer.
Often space observations are performed by continuously collecting data from an instrument aimed at nadir (e.g. directly below the space platform). However, if the platform has the ability to assess the science utility of the features being overflown, an intelligent measurement scheme can improve upon the science return. This approach can be broken down into two main sections: classification and targeting.
Classification deals with the identification of the different cloud types based on the data collected by the radiometer. We use unsupervised machine learning, digital twin, and supervised machine learning to address the challenge of developing a radiometer-based classifier for deep convective storms. We also assess the accuracy of a random decision forest (RDF), support vector machine (SVM), Gaussian naive bayes, feed forward artificial neural network (ANN), and a convolutional neural network (CNN).
Targeting focuses on how we can improve the scientific return of the radar by controlling the on/off state, and by aiming the instrument off nadir. We developed five targeting algorithms to be compared to the baseline approach of randomly sampling nadir.
Technology
Classification
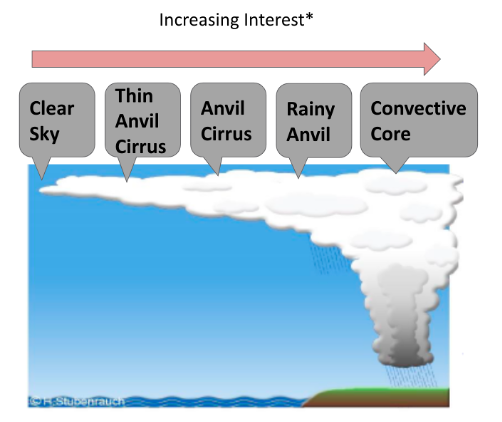
The SMICES classification problem is to correctly classify different cloud types utilizing the information that the on-board radiometer collects. The classifier needs to be able to correctly identify the cloud as one of five cloud types: clear sky, thin cirrus, cirrus, rainy anvil, and convection core. The different cloud types have varying levels of scientific significance, with their ranking demonstrated in image below. The highest value cloud is the convection core followed by the rainy anvil cloud.
We first use clustering and human experts to label the digital twin data. The digital twin datasets include three scientific variables which are used to automatically generate labels for the data with the help of scientists. This avoids the need to manually label the data.
We then use these labels with the digital twin (simulated) radiometer data to train the classifiers. During testing, the classifiers will only have access to the radiance values since those are the only data available in an operational setting.
A set of classifiers were trained and tested on two separate regional datasets: a tropical dataset over the Caribbean, and a non-tropical dataset of the Atlantic Coast of the United States. The physics of a given cloud type can differ depending on whether it is in a tropical or non-tropical region. Thus, we train separate classifiers for each dataset. These classifiers include a random decision forest (RDF), support vector machine (SVM), Gaussian Naïve Bayes, feed forward artificial neural network (ANN), and convolutional neural network (CNN). In an operational setting, we would select the model that corresponds to the geographical region the satellite is over.
Targeting
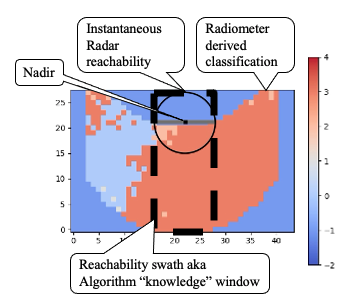
The SMICES problem is a continuous online planning problem implemented as an orbiting satellite where there is no set end to the imaging of the clouds. The radar is able to slew to better target storms, and covers a relatively small area when turned on. Due to power constraints of the satellite, the radar should only be turned on for a fifth of the flight time. If these constraints were applied to current satellite targeting techniques, the result would be randomly sampling 20% of the clouds at nadir under the satellite. Identification of the clouds occurs within the radiometer’s range, which sweeps ahead of the radar’s path. A model of the radar’s view is shown in the image below.
Our algorithms focus specifically on the rainy anvil and convection core clouds discussed in the classification section since they make up storms. In addition to this focus, the scientists wanted to ensure that the radar collects data from all of the cloud types during flight. To accomplish this, the targeting algorithms prioritize convection core clouds, followed by rainy anvil clouds, and then a random sample of the clouds under nadir.
Six algorithms were created with an increasing field of view to demonstrate the improvements gained by utilizing more of the information available to the instrument. The first algorithm serves as the baseline comparison as it is representative of the results we would receive without targeting any clouds.
Impact
The classification system showed promising results when distinguishing deep convective storms in the tropical dataset. Further work needs to be done for finer grained storm type discrimination.
The results of the smart targeting systems are very promising. When comparing the best performing algorithm with the baseline random algorithm, there is a 24x increase in the number of convection core pixels analyzed and an almost 2x increase in rainy anvil pixels analyzed. It is important to note that these results are skewed by the dataset used, which contains a much higher proportion of clouds than we would expect to see in the real world. A dataset closer to a real-world scenario would result in a smaller increase in performance.
Status
This effort began in August 2020. The work on the classification and targeting systems concluded at the end of the year. The radar is still under development with the plan to test the classification and targeting systems in late 2022.
Publications
Team
Jet Propulsion Laboratory, California Institute of TechnologyJason Swope
Steve Chien
Javier Bosch-Lluis
Emily Dunkel
Qing Yue
Peyman Tavallali
Mehmet Ogut
Isaac Ramos
Pekka Kangaslahti
Northrop Grumman Corporation
William Deal
Caitlyn Cooke