Projects
SWOT Station Keeping

Background
Surface Water and Ocean Topography (SWOT) is a future NASA/CNES mission set to launch in 2021, aimed at better understanding Earth’s oceans and its terrestrial surface waters. SWOT will conduct a global survey of Earth’s surface water with unprecedented resolution, allowing scientists to better understand subjects from water supply to oceanic circulation to climate change.Problem
A vital aspect of the mission involves calibrating and validating sensors using in situ measurements. In order to do this, moorings are required at specific locations in the over flight path of the satellite. Deploying physical moorings at all the required locations would be expensive and time consuming.As an alternative to this approach, a dynamically controlled marine vehicle can be used as a virtual mooring. Marine vehicles are simpler and cheaper to deploy, and more flexible once deployed. Multiple vehicles can be deployed at a single, easily accessible location, then commanded to a final position for the virtual mooring. During a deployment, the virtual moorings can be moved with ease, quickly responding to changing priorities. When the deployment is completed, the vehicles can be commanded to rendezvous at a single location to facilitate recovery.
In order to act as a virtual mooring, a vehicle must be able to station keep at a given position. There are any number of vehicles with varying costs and capabilities to consider for this task . These range from inexpensive vertically profiling floats with no horizontal control and deployment times on the order of years, to more expensive short range AUVs with significant control authority – at approximately 2.5m/s horizontally – and deployment times on the order of hours.
Impact
Predictive control station keeping could enable the SWOT mission to perform calibration and validation of the SWOT instrument at greatly reduced cost and potentially improved accuracy as compared to an array of traditional fixed moorings.In experiment we found that unmodified Slocum gliders could fulfill the SWOT station keeping requirements at about half of the virtual mooring locations, but required a propeller add-on for increased speed for the other half, which would require careful battery management. The study concluded that further investigation into the virtual mooring concept is merited, including a trial field campaign to gather in situ data where SWOT overflights will cross, 100's of km off the coast of CA. The methodology developed here could be applied to many oceanic monitoring scenarios: any task where an autonomous underwater vehicle must stay close to a feature of interest to take measurements, despite the presence of significant control disturbances by currents.
Status
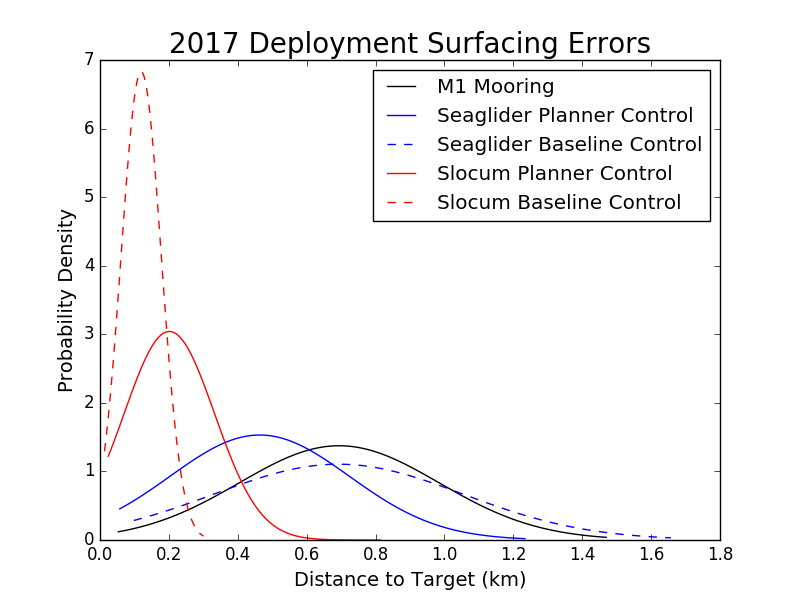
In the Fall of 2016 and the Spring of 2017 we conducted a series of deployments in the Pacific Ocean near Monterey Bay, at a physical mooring M1, to assess the performance of predictive control station keeping. Ocean deployments are expensive and time consuming, so we have also developed a simulation framework to allow us to conduct virtual deployments without going into the field.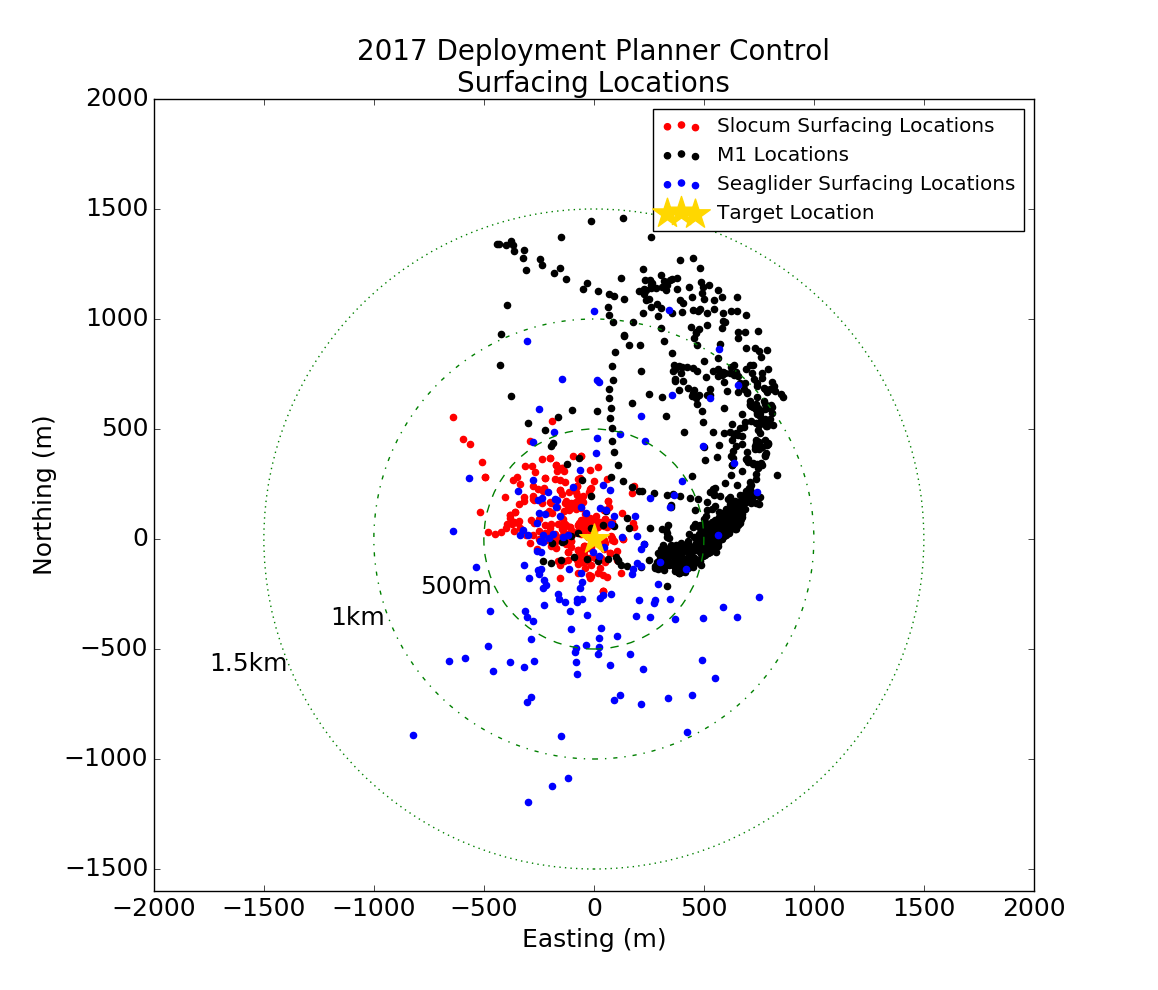
Description
Underwater autonomous gliders are a promising choice for a virtual mooring, as they are inexpensive compared to a physical mooring, capable of being deployed for months at a time, and can travel horizontally at approximately 0.25 m/s. [Hodges and Fratantoni 2009] and [Rudnick, Johnston, and Sherman 2013] both used gliders as virtual moorings with some success. [Hodges and Fratantoni 2009] achieved an average distance from the mooring location of 2.0 km and [Rudnick, Johnston, and Sherman 2013] achieved an average distance of 3.6 km and 1.8 km in two separate experiments.Our approach to station keeping uses a greedy search algorithm and a predictive model of ocean currents in order to simulate the vehicles motion and select the control action that results in the best station keeping performance.
Present approaches to stationkeeping with gliders either do not take control disturbances due to ocean currents into account (effectively assuming that there are zero ocean currents), or use an estimate of ocean currents built up from the error between the vehicle’s expected and actual surfacing locations on recent previous dives. Our stationkeeping algorithm uses a predictive model of ocean currents to anticipate the currents that will be observed by a glider on its next dive, and then select a control scheme that will compensate for those disturbances. It should be noted that in order to improve stationkeeping performance, the currents output from the predictive model do not have to be a perfect reflection of reality, only a better representation than the zero current assumption or the current estimate built up from previous dives’ data.
Publications
Team
Jet Propulsion Laboratory: Evan Clark, Andrew Branch, Faiz Mirza, Steve ChienCalifornia Institute of Technology: Andrew Thompson, Mar Flexas
Remote Sensing Solutions: Yi Chao, John Farrara, David Fratantoni
Rutgers University: David Aragon, Oscar Schofield