Projects
UAVSAR
Background
 The UAVSAR project desmonstrates: onboard processing and interpretation of
radar data and autonomous response to retask vehicle and instrument based upon
interpretation of this data. We first discuss scenarios in which spacebased
radar could benefit from this autonomous interpretation and response
capability. Next we discuss the Uninhabited Aerial Vehicle Synthetic Aperture
Radar (UAVSAR) airborne testbed and its use as a surrogate for a spaceborne
testbed. We then discuss a range of onboard processing products that have been
investigated and produced onboard. We then discuss the retasking model and
process for UAVSAR. We discuss a flight demonstration of the onboard data
processing and retasking that occured in January 2012.
The UAVSAR project desmonstrates: onboard processing and interpretation of
radar data and autonomous response to retask vehicle and instrument based upon
interpretation of this data. We first discuss scenarios in which spacebased
radar could benefit from this autonomous interpretation and response
capability. Next we discuss the Uninhabited Aerial Vehicle Synthetic Aperture
Radar (UAVSAR) airborne testbed and its use as a surrogate for a spaceborne
testbed. We then discuss a range of onboard processing products that have been
investigated and produced onboard. We then discuss the retasking model and
process for UAVSAR. We discuss a flight demonstration of the onboard data
processing and retasking that occured in January 2012.
Problem
Current spaceborne SAR mission concepts downlink data before proecessing and analysis. Formation of imagery onboard can reduce resopnse times to enable more effective monitoring of phenomena using SAR instrumentation.Status
A preliminary system with end to end event detection, retasking, and observtion was demonstrated onborad the JPL/NASA G4 Aerial Testbed in 2012.Description
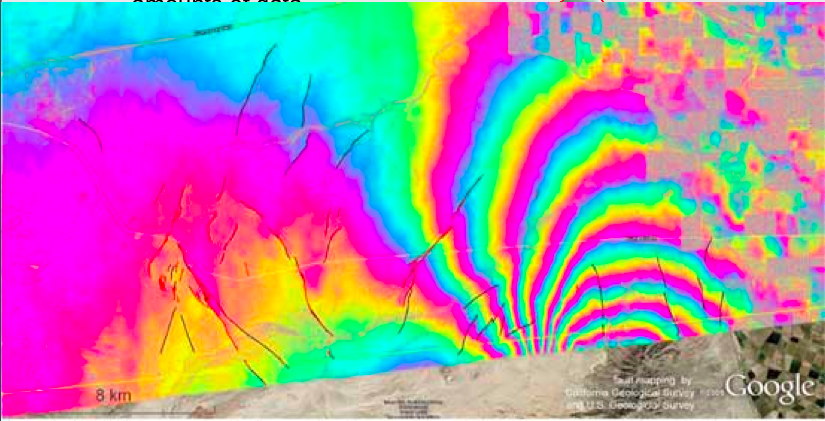
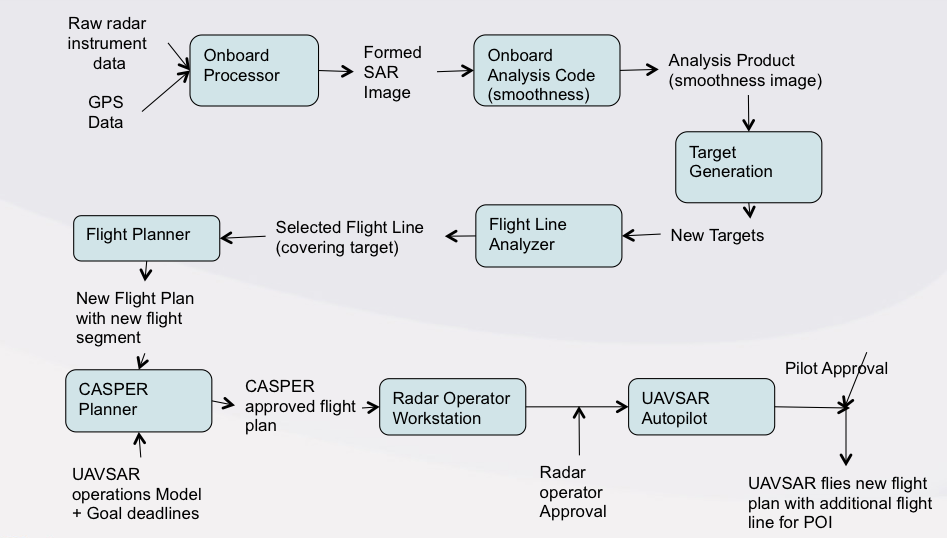
Enabling onboard interpretation and response has many applications for space-based and airborne radar. In each case the first step is to form the radar image. Luckily, for our onboard autonomy work, the UAVSAR project has been addressing exactly this challenging task. Onboard the UAVSAR, the raw radar data is streamed to recorders and is simultaneously streamed to the Onboard Processor which forms the synthetic aperture radar image. This radar image can be formed in a range of polarizations (e.g, HH, HV, etc.). Once the radar image is formed, the backscatter image data can be interpreted using application-specific algorithms. Based on the mission at hand, this interpretation can then be used to direct future operations of the space or air vehicle. For space-based radar, applications of onboard autonomy abound. For example, detection of volcanic activity by detection of ash emissions might trigger followup imagery on a later orbital overflight. Or mapping of the flooded area might be used to direct the same or different radar to acquire higher resolution imagery of the boundary of the flooded area. Or the same area might be imaged on a subsequent overflight to map out a timeseries of the progression of the flood. Alternatively, biomass analysis might be used to map out the progression of a forest fire. All of these scenarios involve the same baseic operations pattern of:- form radar image
- analyze radar imagegenerate new target requests
- assimilate new target requests into operational plan as appropriate based on prioritization.
These scenarios are highlighted by the operations flow shown below.
Below we show the flight plan flown in the airborne demonstration. In the first scren snapshot the UAVSAR acquires the first imagery.
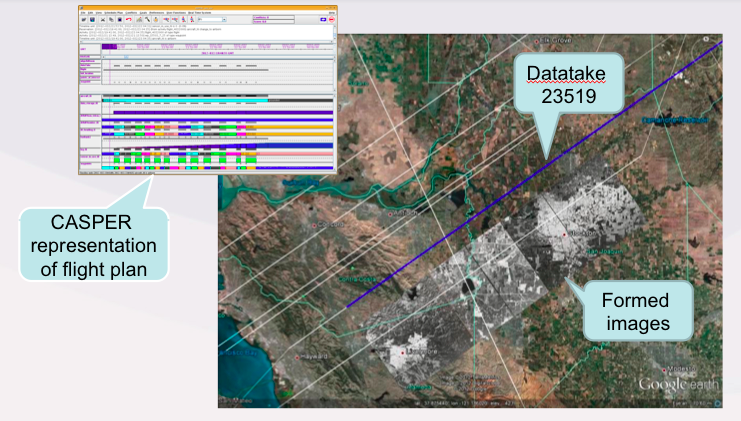
In the second snapshot the image processed onboard is shown with the new observation goals generated (and then flown).
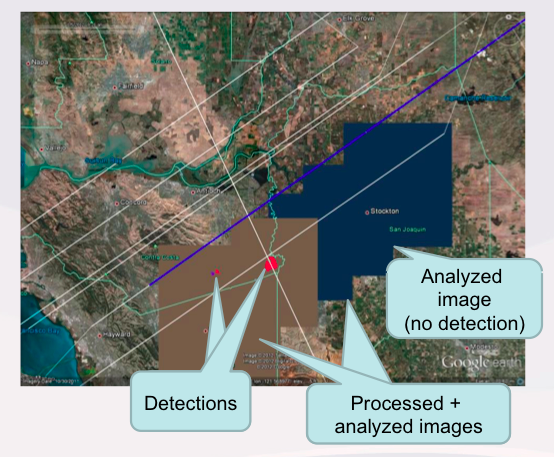
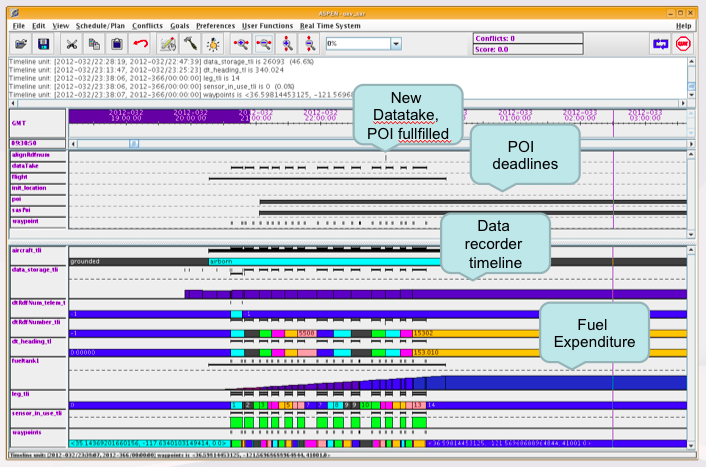
The third snapshot shows the CASPER planner view of the new flight plan.
Applications
A list of the applications is shown below.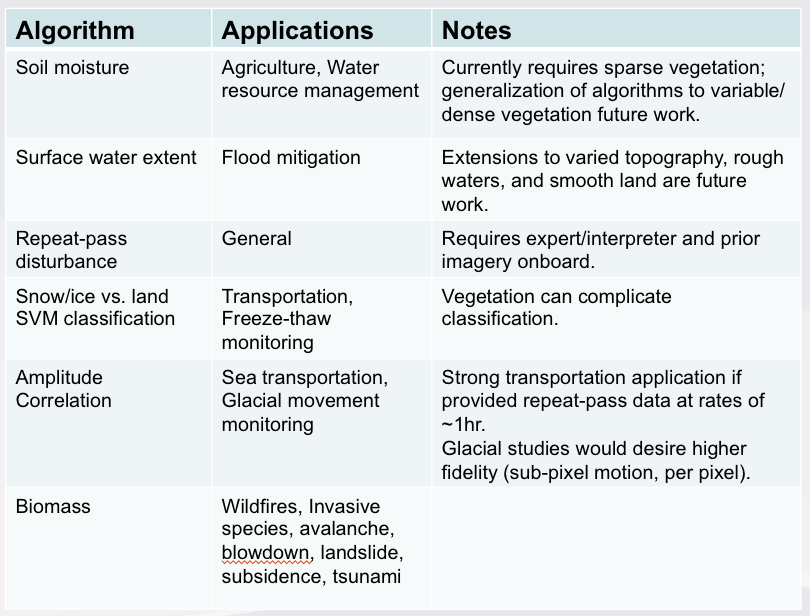
Publications
Team
Joshua DoubledaySteve Chien
Yunling Lou
Daniel Tran
Duane Clark
Ron Mullerschoen