Projects
CADRE Strategic Planner

CADRE Mission logo. Source: JPL/NASA
Background

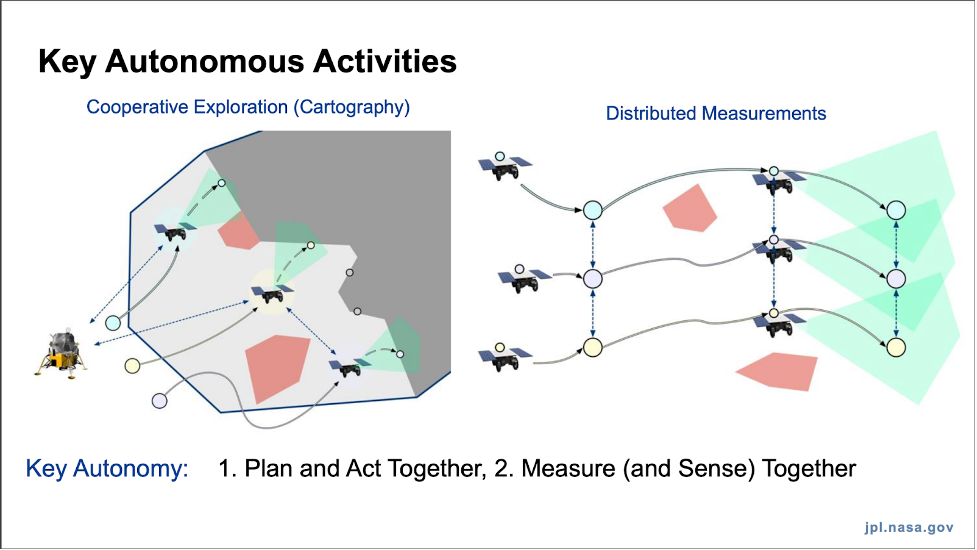
CADRE is a mission to the moon that includes a base station and three rovers for exploring the lunar surface and subsurface. Once deployed, the rovers will autonomously coordinate their activities to safely and efficiently drive and collect scientific data. This includes: electing a leader, dividing up the work among the rovers, developing hazard-free drive paths, map construction, formation driving, and performing synchronized measurements using ground-penetrating radar (GPR). Coordinated GPR measurements enable the construction of 3D maps of the lunar subsurface. The three rovers will work together to explore the surface near the landing site during a single Lunar day (about 10 Earth days).
Problem
Autonomously plan and execute tasks for multiple rovers, coordinating scientific measurements and resource management.Impact
CADRE will demonstrate a cooperative and collaborative autonomous platform for navigation, communication, computation, perception, and decision-making without human interaction for exploring extreme lunar and planetary terrains.Status
CADRE is funded by the the Game Changing Development (GCD) program of the Space Technology Mission Directorate (STMD). CADRE is manifested as a payload on the CP11 (CLPS)/Intuitive Machines (IM-3) mission, scheduled to launch on a Falcon-9 rocket in 2025, with a landing site at Reiner Gamma.Description
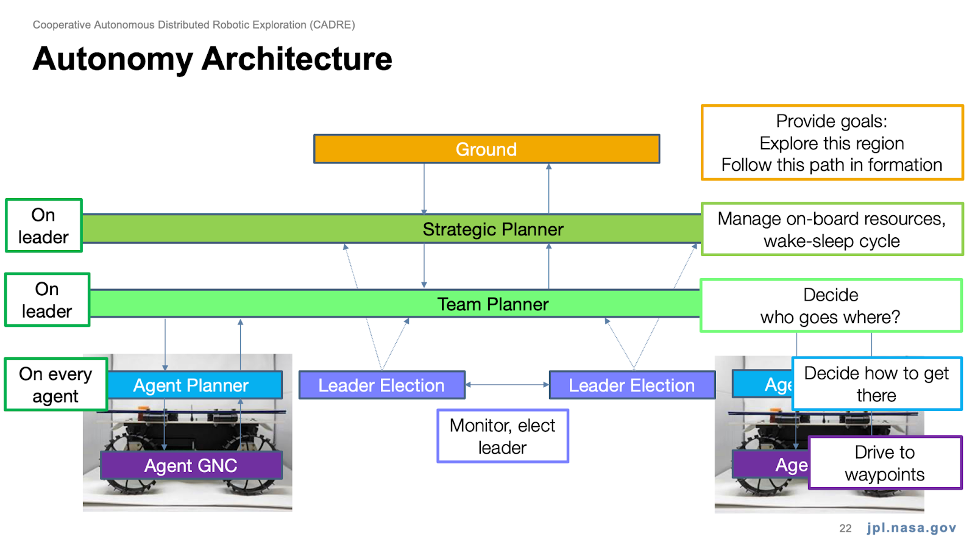
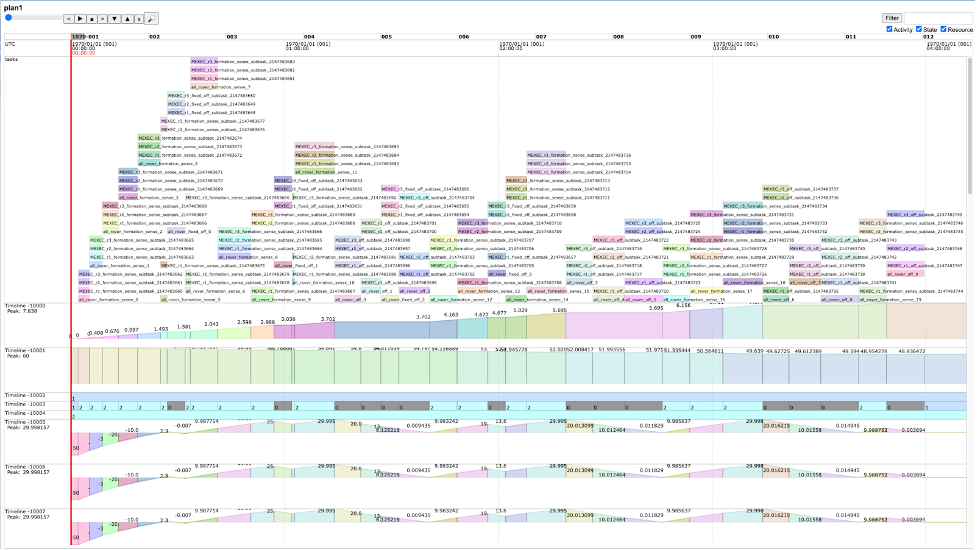
Specifically, the AI group is providing support for the “Strategic Planner”, which is part of a multi-layered autonomy flight software system. Using MEXEC, the Strategic Planner is responsible for deciding when to perform the surveys, and when the rovers should “sleep” to allow the electronics to cool down and the battery to recharge. The environment on the Moon is extreme, with temperatures ranging from 140 °C to −171. Around “midday” on the Moon, temperatures are too hot to keep the rover electronics powered on continuously. Around “morning” and “evening”, while temperatures are cooler, the Sun is providing less energy for the rovers to perform their activities. By monitoring actual temperature and energy levels, and predicting levels from the effects of planned activities, the Strategic Planner will schedule coordinated tasks to ensure that the rovers are making efficient use of their limited time on the Moon while staying within operational limits.
Additionally, the AI group is supporting the CADRE V&V team, specifically with autonomy testing to ensure all layers of the autonomy stack work as intended when integrated together. Autonomy testing will be conducted through both simulations and working with actual test rovers.
References
[1] Saboia, M.; Rossi, F.; Nguyen, V.; Lim, G.; Aguilar, D.; and de la Croix, J. CADRE MoonDB: Distributed Database for Multi-Robot Information-Sharing and Map-Merging for Lunar Exploration. In Intl. Workshop on Autonomous Agents and Multi-Agent Systems for Space Applications (MASSpace), Intl. Conf. on Autonomous Agents and Multi-Agent Systems, May 2024. Paper. Slides.[2] Albee, K.; Bhamidipati, S.; Rossi, F.; Vander Hook, J.; and de la Croix, J. Lunar Leader: Persistent, Optimal Leader Election for Multi-Agent Exploration Teams. In Intl. Workshop on Autonomous Agents and Multi-Agent Systems for Space Applications (MASSpace), Intl. Conf. on Autonomous Agents and Multi-Agent Systems, May 2024. Paper. Slides.
[3] Rossi, F. Multi-Agent Autonomy for Space Exploration. Invited talk at Intl. Workshop on Autonomous Agents and Multi-Agent Systems for Space Applications (MASSpace), Intl. Conf. on Autonomous Agents and Multi-Agent Systems, May 2024. Slides.
Publications
Team
Dr. Federico Rossi (element lead)Gregg Rabideau
Andrew Branch
Joseph Russino
Nihal Dhamani
Dr. Steve Chien (advisor)